Improve Facility Safety
You can achieve a safer work environment by letting the robots do the dangerous, tedious and labour-intensive tasks.

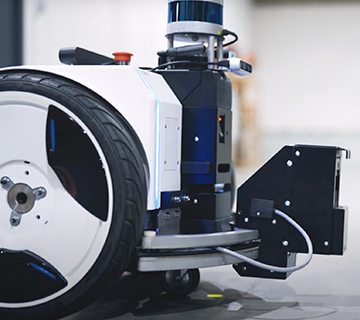
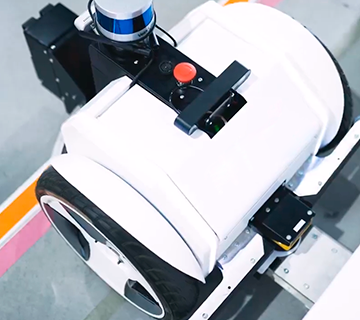
TUGBOT’s first version solves the last pressing challenge in intra-logistics automation: how to automate the thousands of different carts and trolleys manually pulled to move millions of tons of daily freight inside warehouses, factories, construction sites and other businesses. The TUGBOT leverages advanced design, engineering, manufacturing and mechatronics expertise to offer a customisable but reliable gripping system for pulling industrial loads. TUGBOT can perform its assigned tasks autonomously or semi-autonomously, being able to autonomously navigate along complex paths through changing environments with minimal human guidance.
The TUGBOT enables the automation of manual material handling processes by attaching seamlessly to a wide range of wheeled vehicles commonly used in the intra-logistics field.
You can achieve a safer work environment by letting the robots do the dangerous, tedious and labour-intensive tasks.
Our AGVs reduce non value-added labour costs allowing workers to be reassigned to higher-value activities.
A combination of cameras, lasers, sensors and environment matching marks to achieve reliable natural navigation without any changes in the facility infrastructure.
TUGBOT is a software-agnostic robot which means it can be powered by any robot navigation and fleet management software available in the market. TUGBOT currently works with four different software providers and the end users have the flexibility to choose the most applicable platform for their use-case.